Details
Options for 35KG.cm/45kg.cm Torque
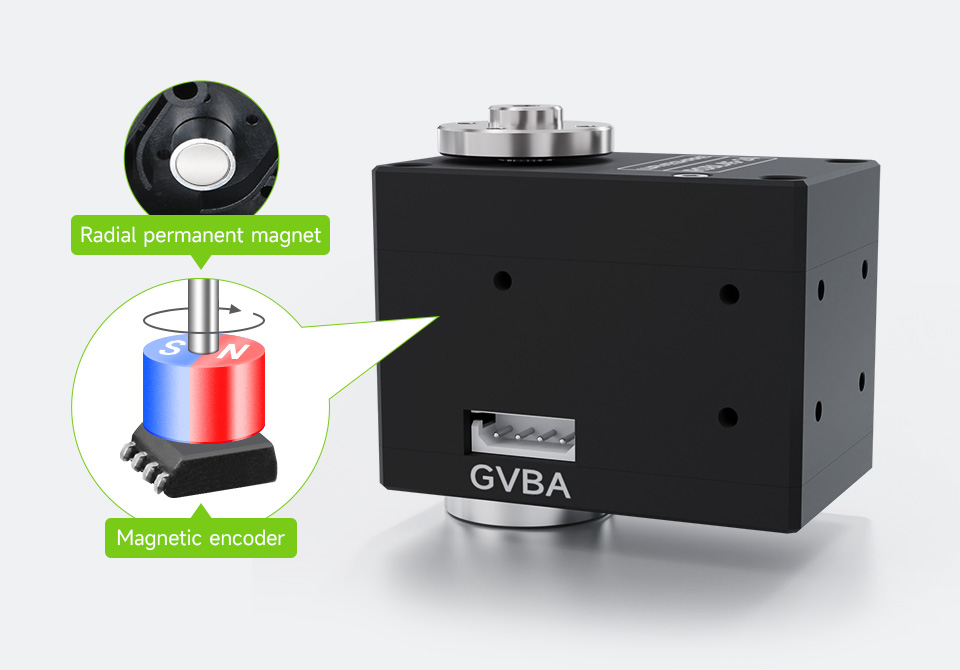
Aluminum Alloy Case, Brushless Motor, with 360° Magnetic Encoder


RSBL35-24-HS
35KG.cm torque

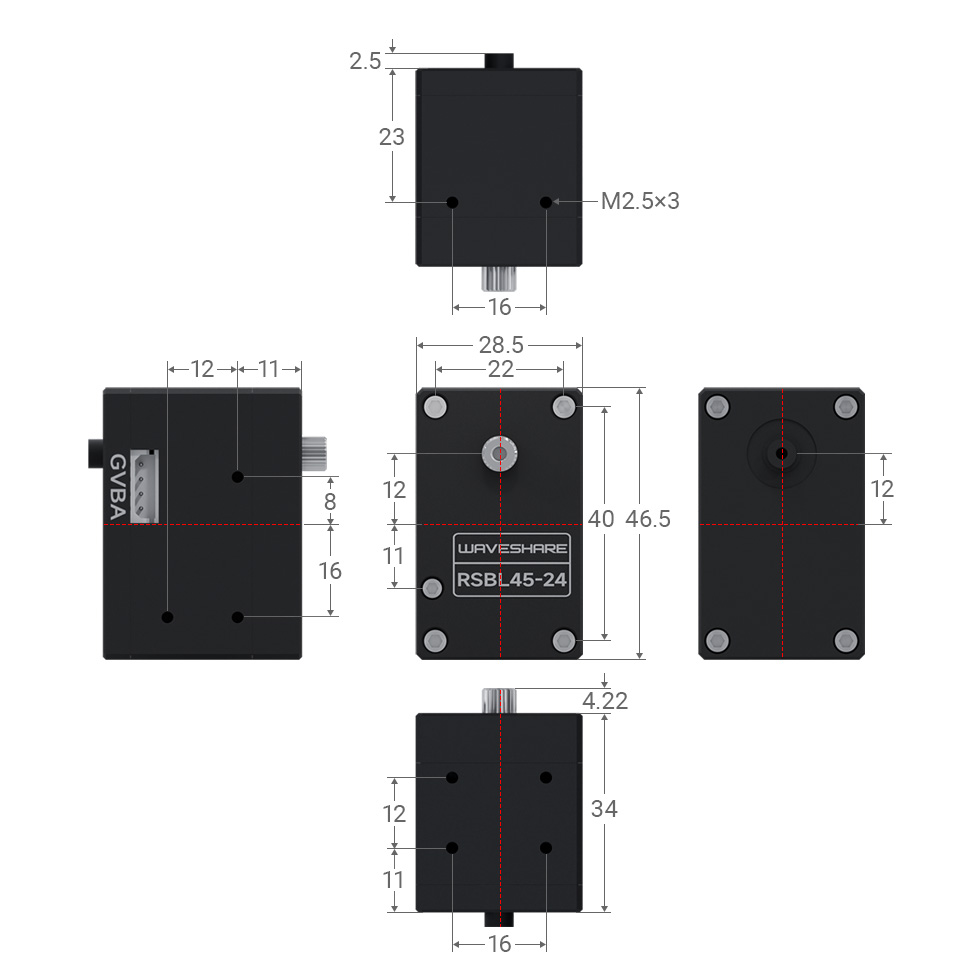
RSBL45-24
45KG.cm torque
| Product model | RSBL35-24-HS | RSBL45-24 |
|---|---|---|
| Torque | 35KG.cm@24V | 45kg.cm@24V |
| Rotation angle | 360° (0~4095) | |
| Position sensor resolution | 0.088° (360°/4096) | |
| Mechanism limit angle | No limit | |
| Working voltage | 9 ~ 24 V (typ. 24V) | |
| Gear | high precision steel gear (reduction ratio 1:232) | high precision steel gear (reduction ratio 1:353) |
| No-load speed | 0.087sec/60degree 115RPM@24V | 0.142sec/60degree 70RPM@24V |
| Encoder type | 360° magnetic encoder | |
| ID range | 1 ~ 253 (1 by default) | |
| Baudrate | 38400bps ~ 1Mbps (1Mbps by default) | |
| No-load current | 200mA | 160mA |
| Locked-rotor current | 1.8A | 2.3A |
| Kt | 19kg.cm/A | |
| weight | 190g | 100g |
| Feedback | Position, Load, Speed, Input Voltage, Current, Temperature | |
To improve the heat tolerance, size stability, rigidity, and mechanical performance of the case

to ensure the strength and durability of servo motor power transmission

Adopts 12-bit high-precision magnetic encoding angle sensor. Compared with the carbon film potentiometer, the angle of the magnetic encoder is enlarged to 360°, and the resolution is increased by 4 times. Since there is a gap and no friction between the magnetic encoder and the radial magnet, the motor lifetime is effectively extended.
Suitable For Building Quadruped Robots, Hexapod Walkers, Robotic Arms And Other Robotic Projects Requiring Multiple motors

Note: the robot arm in the picture above is not included, but we provide its open-source drawing on the wiki. Please refer to the Package Content for detailed part list
Up to 253 servo motors controlling at the same time, with simple wiring, reducing the occupation of the serial port
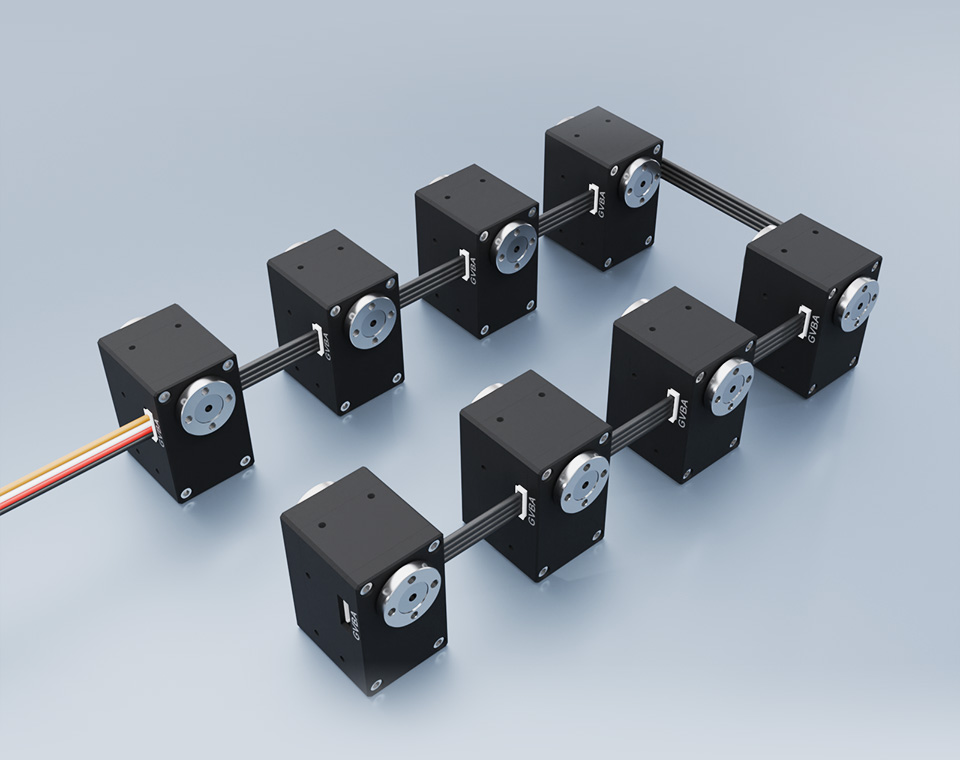
Note: though one channel UART can control up to 253 servo motors, due to the high power of the motors, it is necessary to consider whether the power supply solution is enough when using too many motors.
The speed and acceleration values are settable to make the motion effect softer and reduce impact from inertia
360° installation at any position, one button to set the current position as middle position. Easy to install and debug
Click Release to unlock, then turn the servo motor to the middle position where you want to set
Click Set Middle Position then confirm.
Turn the servo motor to any angle, then click Middle, and the servo motor will automatically return to the middle position initially set.
The servo motor Will Provide Various Feedback Like Position, Load, Speed, Input Voltage, Current and Temperature In Real Time, with unloading force protection when the servo motor is overheated or overloaded

suitable for more application scenarios
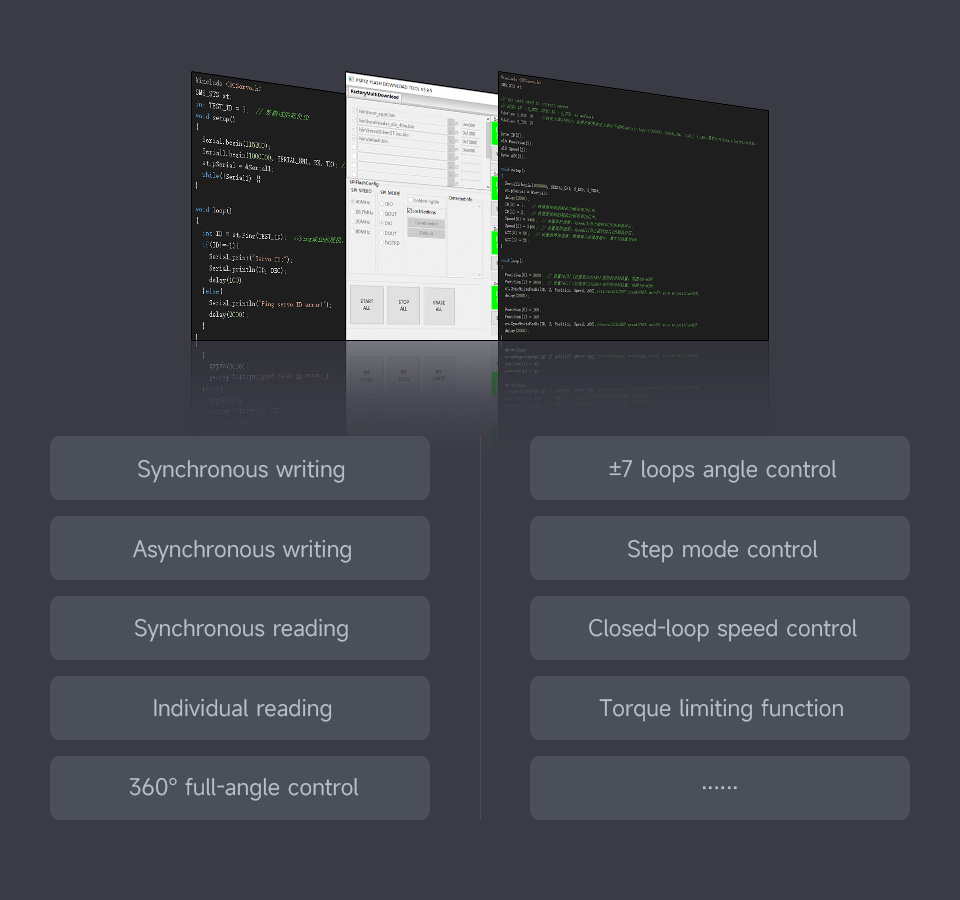
Angle servo mode
Default mode, the angle position is controllable at 0~360° degrees
Speed closed-loop mode
Intelligently control and maintain speed when the load changes
Step mode
Can perform step motion relative to the current position
Supports angle position control in both positive and negative directions up to 7 loops under the default precision setting, but the number of loops will not be saved in case of power loss. Lowering the angle resolution can double the number of control loops
connecting with Bus Servo Driver HAT (A) drive board, we provide open-source control demo of the servo motor
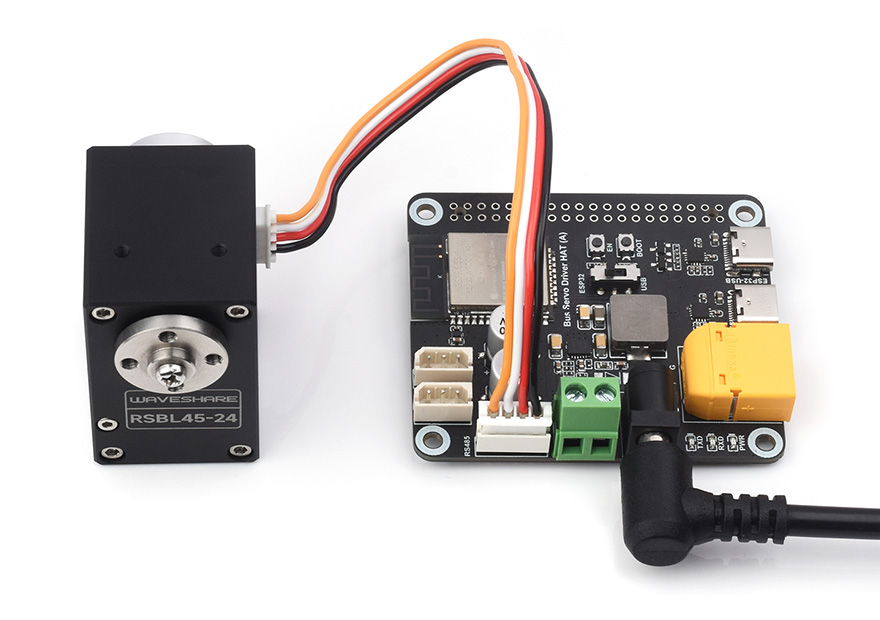
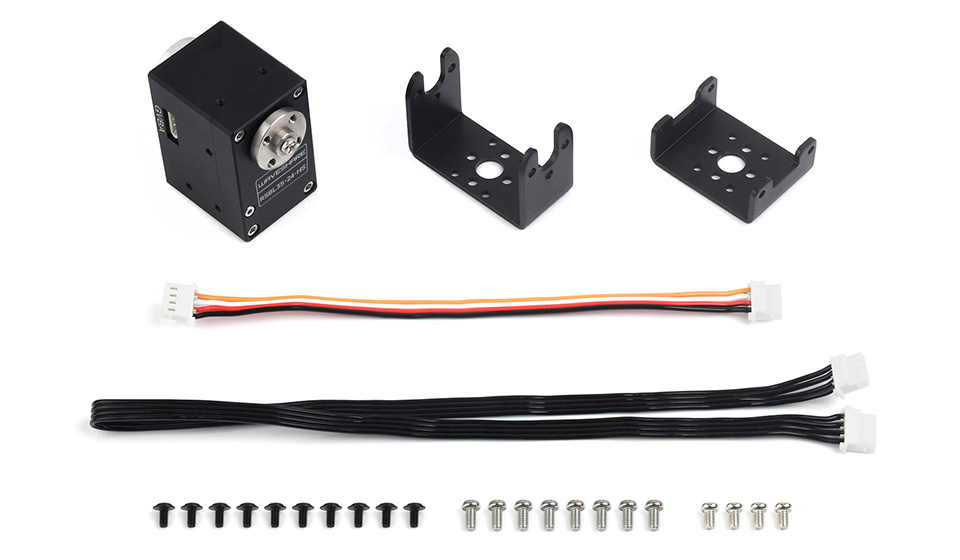
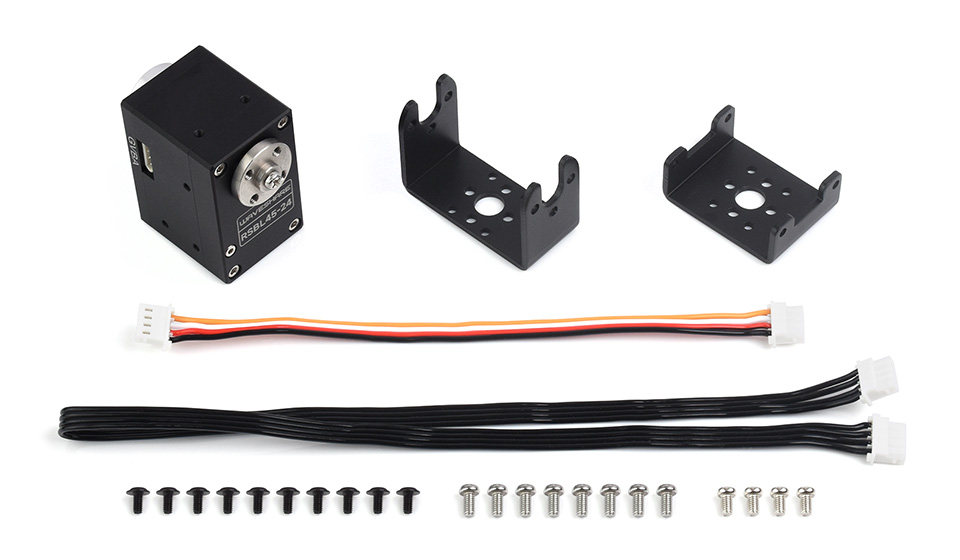
* for reference only, please refer to the Package Content for detailed part list


* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.
| Product | Voltage | Control Method | Precision | NO-LOAD SPEED | Continuous Rotation | LOCKED-ROTOR TORQUE * | LOCKED-ROTOR CURRENT | Range | Feedback |
|---|---|---|---|---|---|---|---|---|---|
| WP90 | 4.8 ~ 7.4 | PWM | ≤2° | 0.1sec/60° | - | 2.3kg.cm | 1.0A | 180° | - |
| SC09 | 4.8 ~ 8.4 | TTL | 300°/1024 | 0.1sec/60° | √ | 2.3kg.cm | 1.0A | 300° | √ |
| SC15 | 4.8 ~ 8.4 | TTL | 180° / 1024 | 0.16 sec / 60° | √ | 15kg.cm | 1.5A | 180° | √ |
| ST3020 | 6 ~ 14.0 | TTL | 360° / 4096 | 0.167sec / 60° | √ | 25kg.cm | 2.7A | 360° | √ |
| ST3215 | 6 ~ 12.6 | TTL | 360° / 4096 | 0.222 sec / 60° | √ | 30kg.cm | 2.7A | 360° | √ |
| ST3025 | 6 ~ 12.6 | TTL | 360° / 4096 | 0.117sec / 60° | √ | 40kg.cm | 4.4A | 360° | √ |
| ST3235 | 6 ~ 12.6 | TTL | 360° / 4096 | 0.222sec/60° | √ | 30kg.cm | 2.7A | 360° | √ |
| CF35-12 | 9.0 ~ 12.6 | TTL | 360° / 4096 | 0.222sec/60° | √ | 35kg.cm | 2.8A | 360° | √ |
| RSBL35-24-HS | 9.0 ~ 24.0 | RS485 | 360° / 4096 | 0.087sec/60° | √ | 35kg.cm | 1.8A | 360° | √ |
| RSBL45-24 | 9.0 ~ 24.0 | RS485 | 360° / 4096 | 0.142sec/60° | √ | 45kg.cm | 2.3A | 360° | √ |
| RSBL85-12 | 9.0 ~ 12.0 | RS485 | 360° / 4096 | 0.167sec/60° | √ | 85kg.cm | 7.9A | 360° | √ |
| RSBL85-24 | 9.0 ~ 24.0 | RS485 | 360° / 4096 | 0.154sec/60° | √ | 85kg.cm | 5.6A | 360° | √ |
| RSBL120-24 | 9.0 ~ 24.0 | RS485 | 360° / 4096 | 0.2sec/60° | √ | 120kg.cm | 4A | 360° | √ |
* the Locked-rotor torque is measured at the typical voltage of each servo, please refer to the documentation in the wiki for more details
Quick Overview
RSBL45-24
RSBL45-24 x1
RSBL35-24-HS
RSBL35-24-HS x1