
Pico LCD 1.14
| ||

Overview
Provide Pico C demo
Parameters
| Parameter name | parameters |
| Power Supply | 2.6V ~ 5.5V |
| Operating Current | 40mA |
| Screen Type | IPS |
| Control Chip | ST7789VW |
| Communication Interface | 4-wire SPI |
| Resolution | 135 (H) RGB x 240 (V) Pixels |
| Pixel Size | 0.1101 (H) x 0.1035 (V)mm |
| Display Size | 14.864 (H) x 24.912 (V)mm |
| Dimensions | 25.00 (H) x 52.00 (V) mm |
Pinout

LCD and the controller
The built-in controller used in this LCD is ST7789VW, which is an LCD controller with 240 x RGB x 320 pixels, while the pixels of this LCD itself is 135 (H) RGB x 240 (V). There are two types of horizontal and vertical screens, so the internal RAM of the LCD is not fully used.
The LCD supports 12-bit, 16-bit, and 18-bit input color formats per pixel, namely RGB444, RGB565, and RGB666 three color formats, this routine uses RGB565 color format, which is also a commonly used RGB format.
The LCD uses a four-wire SPI communication interface, which can greatly save the GPIO port, and the communication speed will be faster.
Working Protocol

Note: Different from the traditional SPI protocol, the data line from the slave to the master is hidden since the device only has a display requirement.
RESX Is the reset pin, it should be low when powering the module and be higher at other times;;
CSX is slave chip select, when CS is low, the chip is enabled.
D/CX is data/command control pin, when DC = 0, write command, when DC = 1, write data
SDA is the data pin for transmitting RGB data, it works as the MOSI pin of SPI interface;
SCL work s the SCLK pins of SPI interface.
SPI communication has data transfer timing, which is combined by CPHA and CPOL.
CPOL determines the level of the serial synchronous clock at an idle state. When CPOL = 0, the level is Low. However, CPOL has little effect on the transmission.
CPHA determines whether data is collected at the first clock edge or at the second clock edge of the serial synchronous clock; when CPHL = 0, data is collected at the first clock edge.
There are 4 SPI communication modes. SPI0 is commonly used, in which CPHL = 0, CPOL = 0.
Pico-LCD-1.14 Connection And Demo
Hardware connection
Please take care of the direction when you connect Pico, a USB port is printed to indicate. You can also check the pin of Pico and the LCD board when connecting.
You can connect the display according to the table.
| e-Paper | Pico | Description |
| VCC | VSYS | Power Input |
| GND | GND | Ground |
| DIN | GP11 | SPI MOSI pin, data input from the device |
| CLK | GP10 | SPI SCK pin, clock pin |
| CS | GP9 | Chip selection of SPI, low active |
| DC | GP8 | Data/Command control pin (High for data, Low for command) |
| RST | GP12 | Reset pin, low active |
| BL | GP13 | Backlight control |
Connection (Directly)

Connection (with adapter board)

Download Demo codes
Open the terminal and run the following command:
- If you buy the V1 version which has four keys.
sudo apt-get install p7zip-full cd ~ sudo wget https://files.waveshare.com/upload/2/28/Pico_code.7z 7z x Pico_code.7z -o./Pico_code cd ~/Pico_code cd c/build/
- If you buy the V2 version which has a joystick.
sudo apt-get install p7zip-full cd ~ sudo wget https://files.waveshare.com/upload/0/06/Pico-LCD-1.14.zip 7z x Pico-LCD-1.14.zip -o./Pico-LCD-1.14 cd ~/Pico-LCD-1.14 cd c/build/
Run the Demo codes
C examples
This guide is based on Raspberry Pi. However, due to the multi-platform and portable features of CMake, it can also be successfully compiled on a PC, but the operation is slightly different, and you need to judge by yourself. Open a terminal and enter the directory of C codes:
cd ~/Pico_code/c/
Create a build folder and add SDK:
For example, if the path of SDK is ../../pico-sdk
Then you should create build and add the path like these:
cd build export PICO_SDK_PATH=../../pico-sdk (Note: Be sure to write the path where your own SDK is located)
Run cmake.. command to to generate Makefile file
cmake ..
Open main.c under the c folder, and you can change the demo you need. This demo can drive the display of our company's Pico series and the source code will be updated all the time. Please select the corresponding LCD or OLED test function and comment out the irrelevant functions.

Run make command to build.
make -j9
After the compilation is complete, the uf2 file will be generated. Press and hold the button on the Pico board, connect the Pico to the USB port of the Raspberry Pi through the Micro USB cable, and release the button. After connecting, the Raspberry Pi will automatically recognize a removable disk (RPI-RP2) and copy the main.uf2 file in the build folder to the recognized removable disk (RPI-RP2).
cp main.uf2 /media/pi/RPI-RP2/
Python codes
Use in Windows
- 1. Press and hold the BOOTSET button on the Pico board, connect the Pico to the USB port of the computer through the Micro USB cable, and release the button after the computer recognizes a removable hard disk (RPI-RP2).
- 2. Copy the pico_micropython_20210121.uf2 file in the python directory to the recognized removable disk (RPI-RP2).
- 3. Open Thonny IDE (Note: Use the latest version of Thonny, otherwise there is no Pico support package, the latest version under Windows is v3.3.3).
- 4. Click Tools -> Settings -> Interpreter, and select Pico and the corresponding port as shown in the figure.

- 5. File -> Open -> the corresponding pico-lcd-0.96.py file, click to run, as shown in the following figure:

This demo provides a simple program...
Run in Raspberry Pi
- 1. The process of flashing the firmware is the same as that on Windows, you can choose to copy the pico_micropython_20210121.uf2 file into pico on the PC or Raspberry Pi.
- 2. Open Thonny IDE on the Raspberry Pi (click the Raspberry logo -> Programming -> Thonny Python IDE), you can check the version information in Help->About Thonny.
To ensure that your version has a Pico support package, you can also click Tools -> Options... -> Interpreter to select MicroPython (Raspberry Pi Pico and ttyACM0 port.
As shown below:

If your Thonny doesn't support Pico, you can update it with the following command:
sudo apt upgrade thonny
- Choose File -> Open... -> python/Pico-LCD-0.96/Pico-LCD-0.96.py, run the codes.
Codes Analysis
C
Bottom hardware interface
We package the hardware layer for easily porting to the different hardware platforms.
DEV_Config.c(.h) in the directory:...\c\lib\Config
- Data type:
#define UBYTE uint8_t #define UWORD uint16_t #define UDOUBLE uint32_t
- Module initialize and exit:
void DEV_Module_Init(void); void DEV_Module_Exit(void); Note: 1. The functions above are used to initialize the display or exit handle.
- GPIO write/read:
void DEV_Digital_Write(UWORD Pin, UBYTE Value); UBYTE DEV_Digital_Read(UWORD Pin);
- SPI transmits data
void DEV_SPI_WriteByte(UBYTE Value);
Application functions
We provide basic GUI functions for testing, like draw point, line, string, and so on.
The GUI function can be found in directory:..\c\lib\GUI\GUI_Paint.c(.h)

The fonts used can be found in the directory: RaspberryPi\c\lib\Fonts

- Create a new image, you can set the image name, width, height, rotate angle, and color.
void Paint_NewImage(UWORD *image, UWORD Width, UWORD Height, UWORD Rotate, UWORD Color, UWORD Depth) Parameter: image : Name of the image buffer, this is a pointer; Width : Width of the image; Height: Height of the image; Rotate: Rotate angle of the Image; Color : The initial color of the image; Depth : Depth of the color
- Select image buffer: You can create multiple image buffers at the same time and select the certain one and draw by this function.
void Paint_SelectImage(UBYTE *image) Parameter: image: The name of the image buffer, this is a pointer;
- Rotate image: You need to set the rotation angle of the image, this function should be used after Paint_SelectImage(). The angle can be 0, 90, 180, 270
void Paint_SetRotate(UWORD Rotate) Parameter: Rotate: Rotate the angle of the image, the parameter can be ROTATE_0, ROTATE_90, ROTATE_180, ROTATE_270.
- 【Note】Afer rotating, the place of the first pixel is different as below


- Image mirror: This function is used to set the image mirror.
void Paint_SetMirroring(UBYTE mirror) Parameter: mirror: Mirror type if the image, the parameter can be MIRROR_NONE、MIRROR_HORIZONTAL、MIRROR_VERTICAL、MIRROR_ORIGIN.
- Set the position and color of pixels: This is the basic function of GUI, it is used to set the position and color of a pixel in the buffer.
void Paint_SetPixel(UWORD Xpoint, UWORD Ypoint, UWORD Color) Parameter: Xpoint: The X-axis position of the point in the image buffer Ypoint: The Y-axis position of the point in the image buffer Color: The color of the point
- Color of the image: To set the color of the image, this function always be used to clear the display.
void Paint_Clear(UWORD Color) Parameter: Color: The color of the image
- Color of the windows: This function is used to set the color of windows, it is always used for updating partial areas like displaying a clock.
void Paint_ClearWindows(UWORD Xstart, UWORD Ystart, UWORD Xend, UWORD Yend, UWORD Color) Parameter: Xstart: X-axis position of the start point. Ystart: Y-axis position of the start point. Xend: X-axis position of the endpoint. Yend: Y-axis position of the endpoint Color: Color of the windows.
- Draw point: Draw a point at the position (Xpoint, Ypoint) of the image buffer, you can configure the color, size, and style.
void Paint_DrawPoint(UWORD Xpoint, UWORD Ypoint, UWORD Color, DOT_PIXEL Dot_Pixel, DOT_STYLE Dot_Style)
Parameter:
Xpoint: X-axis position of the point.
Ypoint: Y-axis position of the point
Color: Color of the point
Dot_Pixel: Size of the point, 8 sizes are available.
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Dot_Style: Style of the point, it defines the extended mode of the point.
typedef enum {
DOT_FILL_AROUND = 1,
DOT_FILL_RIGHTUP,
} DOT_STYLE;
- Draw line: Draw a line from (Xstart, Ystart) to (Xend, Yend) in the image buffer, you can configure the color, width, and style.
void Paint_DrawLine(UWORD Xstart, UWORD Ystart, UWORD Xend, UWORD Yend, UWORD Color, LINE_STYLE Line_Style , LINE_STYLE Line_Style)
Parameter:
Xstart: Xstart of the line
Ystart: Ystart of the line
Xend: Xend of the line
Yend: Yend of the line
Color: Color of the line
Line_width: Width of the line, 8 sizes are available.
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Line_Style: Style of the line, Solid or Dotted.
typedef enum {
LINE_STYLE_SOLID = 0,
LINE_STYLE_DOTTED,
} LINE_STYLE;
- Draw a rectangle: Draw a rectangle from (Xstart, Ystart) to (Xend, Yend), you can configure the color, width, and style.
void Paint_DrawRectangle(UWORD Xstart, UWORD Ystart, UWORD Xend, UWORD Yend, UWORD Color, DOT_PIXEL Line_width, DRAW_FILL Draw_Fill)
Parameter:
Xstart: Xstart of the rectangle.
Ystart: Ystart of the rectangle.
Xend: Xend of the rectangle.
Yend: Yend of the rectangle.
Color: Color of the rectangle
Line_width: The width of the edges. 8 sizes are available.
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Draw_Fill: Style of the rectangle, empty or filled.
typedef enum {
DRAW_FILL_EMPTY = 0,
DRAW_FILL_FULL,
} DRAW_FILL;
- Draw circle: Draw a circle in the image buffer, use (X_Center Y_Center) as the center and Radius as the radius. You can configure the color, width of the line and style of the circle.
void Paint_DrawCircle(UWORD X_Center, UWORD Y_Center, UWORD Radius, UWORD Color, DOT_PIXEL Line_width, DRAW_FILL Draw_Fill)
Parameter:
X_Center: X-axis of center
Y_Center: Y-axis of center
Radius: radius of the circle
Color: Color of the circle
Line_width: The width of arc, 8 sizes are available.
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Draw_Fill: Style of the circle: empty or filled.
typedef enum {
DRAW_FILL_EMPTY = 0,
DRAW_FILL_FULL,
} DRAW_FILL;
- Show Ascii character: Show a character in (Xstart, Ystart) position, you can configure the font, foreground, and background.
void Paint_DrawChar(UWORD Xstart, UWORD Ystart, const char Ascii_Char, sFONT* Font, UWORD Color_Foreground, UWORD Color_Background) Parameter: Xstart: Xstart of the character Ystart: Ystart of the character Ascii_Char: Ascii char Font: five fonts are available: font8:5*8 font12:7*12 font16:11*16 font20:14*20 font24:17*24 Color_Foreground: foreground color Color_Background: background color
- Draw string: Draw string at (Xstart Ystart), you can configure the fonts, foreground, and the background
void Paint_DrawString_EN(UWORD Xstart, UWORD Ystart, const char * pString, sFONT* Font, UWORD Color_Foreground, UWORD Color_Background) Parameter: Xstart: Xstart of the string Ystart: Ystart of the string pString:String Font: five fonts are available: font8:5*8 font12:7*12 font16:11*16 font20:14*20 font24:17*24 Color_Foreground: foreground color Color_Background: background color
- Draw Chinese string: Draw Chinese string at (Xstart Ystart) of image buffer. You can configure fonts (GB2312), foreground, and background.
void Paint_DrawString_CN(UWORD Xstart, UWORD Ystart, const char * pString, cFONT* font, UWORD Color_Foreground, UWORD Color_Background) Parameter: Xstart: Xstart of string Ystart: Ystart of string pString: string Font: GB2312 fonts, two fonts are available : font12CN:ascii 11*21,Chinese 16*21 font24CN:ascii 24*41,Chinese 32*41 Color_Foreground: Foreground color Color_Background: Background color
- Draw number: In the image buffer, at (Xstart Ystart) as the left vertex, write a string of numbers, you can choose the Ascii font, font foreground color, or font background color.
void Paint_DrawNum(UWORD Xpoint, UWORD Ypoint, double Nummber, sFONT* Font, UWORD Digit,UWORD Color_Foreground, UWORD Color_Background);
Parameter:
Xstart: Left vertex X coordinate
Ystart: Left vertex Y coordinate
Nummber: The displayed number is stored in a 32-bit int type, which can be displayed up to 2147483647.
font8:5*8
font12:7*12
font16:11*16
font20:14*20
font24:17*24
Digit: Display decimal places
Color_Foreground: Foreground color
Color_Background: Background color
- Display time: Display time at (Xstart Ystart) of the image buffer, you can configure fonts, foreground, and background.
void Paint_DrawTime(UWORD Xstart, UWORD Ystart, PAINT_TIME *pTime, sFONT* Font, UWORD Color_Background, UWORD Color_Foreground) Parameter: Xstart: Xstart of time Ystart: Ystart of time pTime: Structure of time Font: Ascii font, five fonts are available font8:5*8 font12:7*12 font16:11*16 font20:14*20 font24:17*24 Color_Foreground: Foreground Color_Background: Background
Resource
Document
Examples
Development Software
Pico Quick Start
Download Firmware
- MicroPython Firmware Download

- C_Blink Firmware Download

Video Tutorial
- Pico Tutorial I - Basic Introduction
- Pico Tutorial II - GPIO
- Pico Tutorial III - PWM
- Pico Tutorial IV - ADC
- Pico Tutorial V - UART
- Pico Tutorial VI - To be continued...
MicroPython Series
- 【MicroPython】 machine.Pin Function
- 【MicroPython】 machine.PWM Function
- 【MicroPython】 machine.ADC Function
- 【MicroPython】 machine.UART Function
- 【MicroPython】 machine.I2C Function
- 【MicroPython】 machine.SPI Function
- 【MicroPython】 rp2.StateMachine
C/C++ Series
Arduino IDE Series
Install Arduino IDE
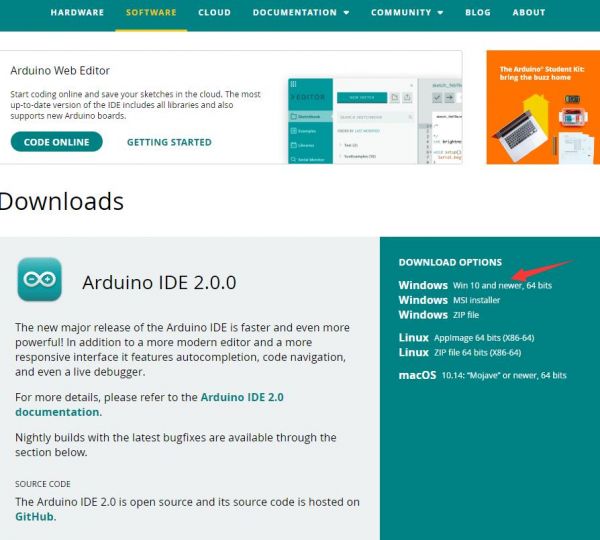
-
Download the Arduino IDE installation package from Arduino website.
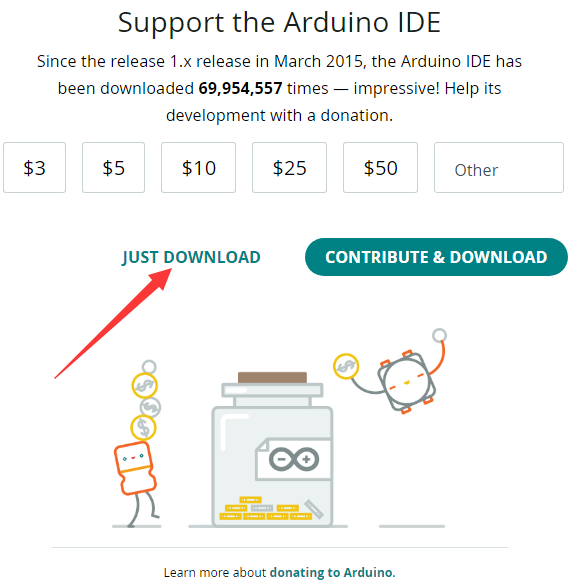
-
Just click on "JUST DOWNLOAD".
-
Click to install after downloading.
-
Note: You will be prompted to install the driver during the installation process, we can click Install.



Install Arduino-Pico Core on Arduino IDE
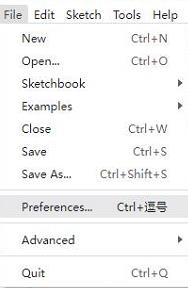
-
Open Arduino IDE, click the File on the left corner and choose "Preferences".
-
Add the following link in the additional development board manager URL, then click OK.
https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
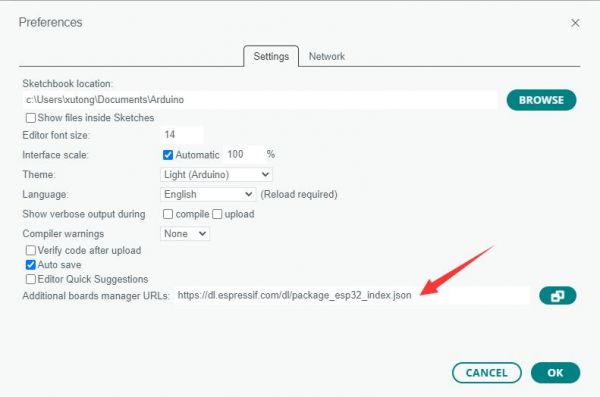
Note: If you already have the ESP8266 board URL, you can separate the URLs with commas like this:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
-
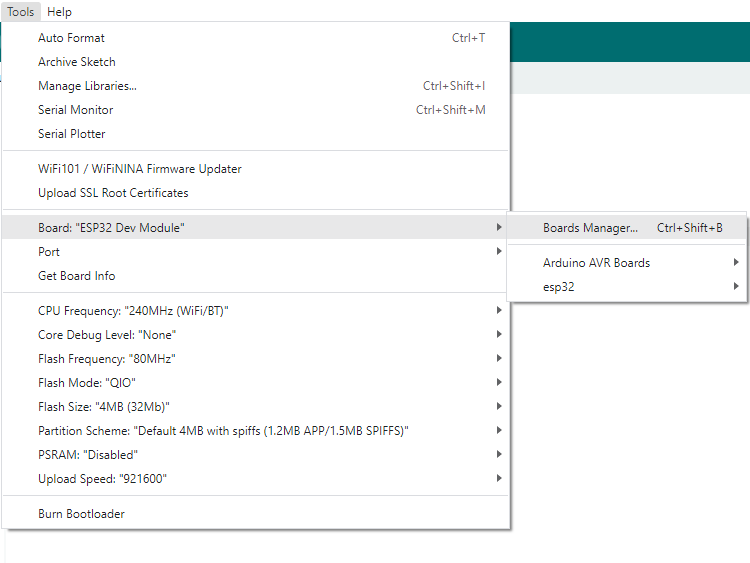
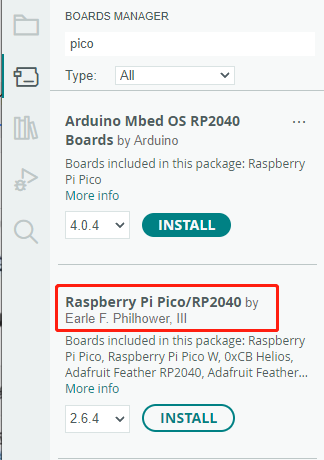
Click on Tools -> Dev Board -> Dev Board Manager -> Search for pico, it shows installed since my computer has already installed it.




Upload Demo At the First Time
-
Press and hold the BOOTSET button on the Pico board, connect the Pico to the USB port of the computer via the Micro USB cable, and release the button when the computer recognizes a removable hard drive (RPI-RP2).
- Download the demo, open arduino\PWM\D1-LED path under the D1-LED.ino.
-
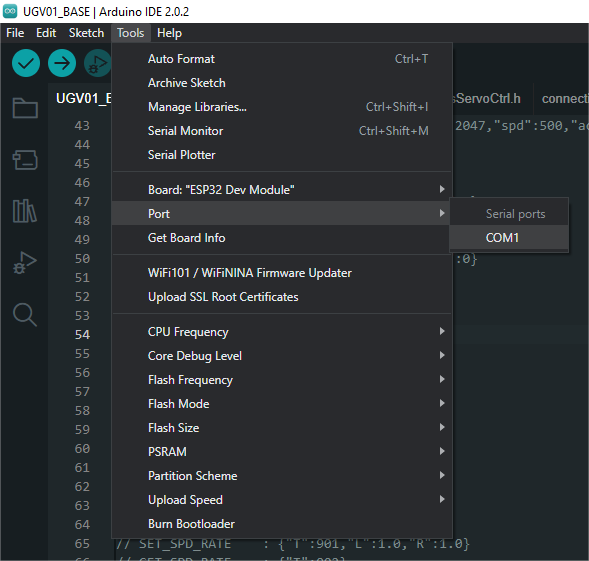
Click Tools -> Port, remember the existing COM, do not need to click this COM (different computers show different COM, remember the existing COM on your computer).
-
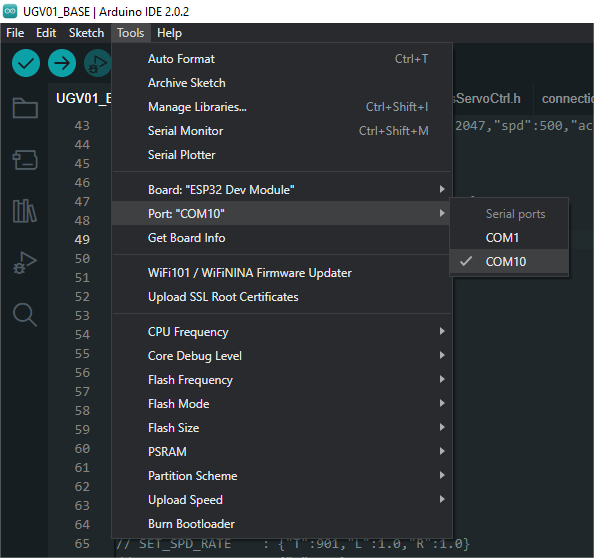
Connect the driver board to the computer with a USB cable, then click Tools -> Ports, select uf2 Board for the first connection, and after the upload is complete, connecting again will result in an additional COM port.
-
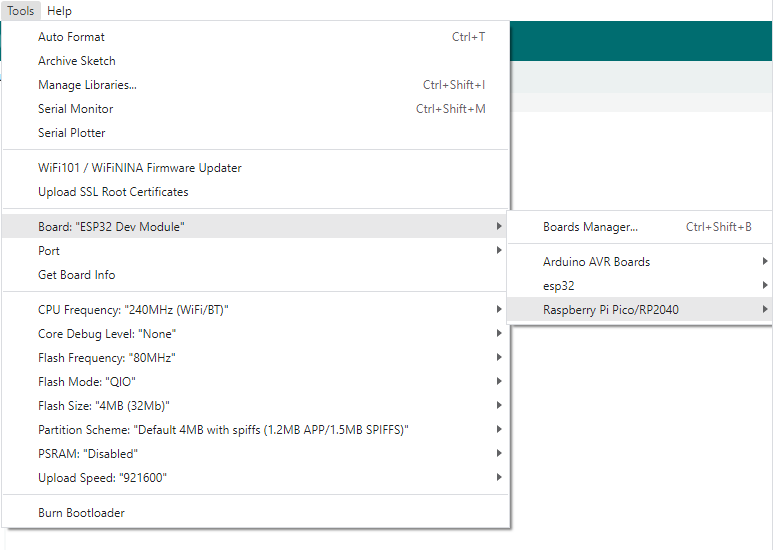
Click Tool -> Dev Board -> Raspberry Pi Pico/RP2040 -> Raspberry Pi Pico.
-
After setting, click the right arrow to upload.
- If you encounter problems during the period, you need to reinstall or replace the Arduino IDE version, uninstall the Arduino IDE needs to be uninstalled cleanly, after uninstalling the software you need to manually delete all the contents of the folder C:\Users\[name]\AppData\Local\Arduino15 (you need to show the hidden files in order to see it) and then reinstall.





Open Source Demo
- MicroPython Demo (GitHub)
- MicroPython Firmware/Blink Demo (C)
- Official Raspberry Pi C/C++ Demo
- Official Raspberry Pi MicroPython Demo
- Arduino Official C/C++ Demo
FAQ

Support
Technical Support
If you need technical support or have any feedback/review, please click the Submit Now button to submit a ticket, Our support team will check and reply to you within 1 to 2 working days. Please be patient as we make every effort to help you to resolve the issue.
Working Time: 9 AM - 6 PM GMT+8 (Monday to Friday)