Details
360° Laser Scanning

| Ranging Distance | 0.15 ~ 8.00 m |
|---|---|
| Ranging Average Accuracy | 5mm (< 1 m) 1.5% of actual distance (1~6 m) 2% of actual distance (6~8 m) |
| Scanning Frequency | 6 Hz |
| Scanning Angle | 360° |
| Ranging Frequency | 2300 Hz |
| Resolution | ≈ 20 mm |
| Wavelength | 775 ~ 793 nm (Typ 800) |
| Communication Interface | UART @ 115200 |
| Power Supply | 5 V |
| Power Consumption | ≈ 1.3 W |
| Operating Current | 240 mA |
| Weight | 143 g |
| Operating Temperature | -10°C ~ 40°C |
| Lifetime | 1500+ hours |
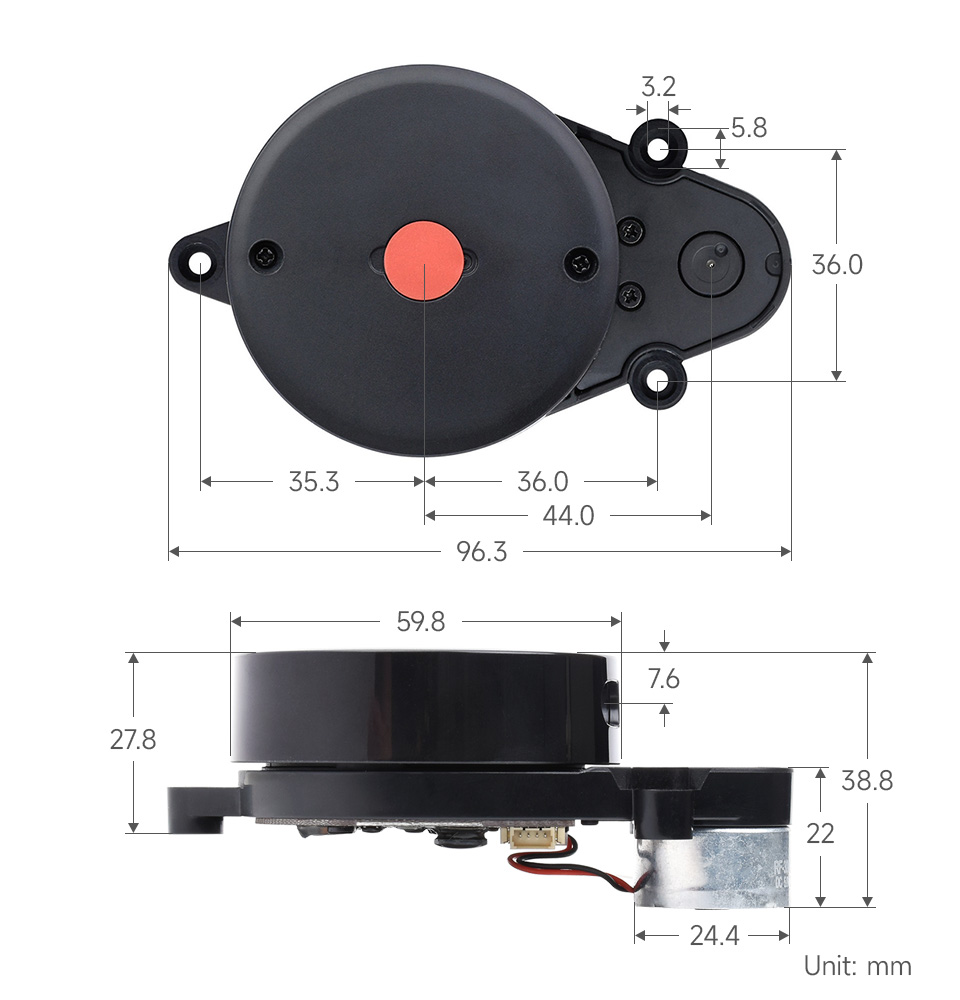
| Dimensions (L × W × H) |
96.3 × 59.8 × 38.80mm |
Provides open-source program, schematic diagram, and other resources of the adapter board, which can be used to develop and operate the Lidar personally, effectively prolonging its lifetime
LD14 can sense the environment information in a longer range, which ensures the robot’s ability to cruise and build maps in a larger area and obtain more environmental profile information

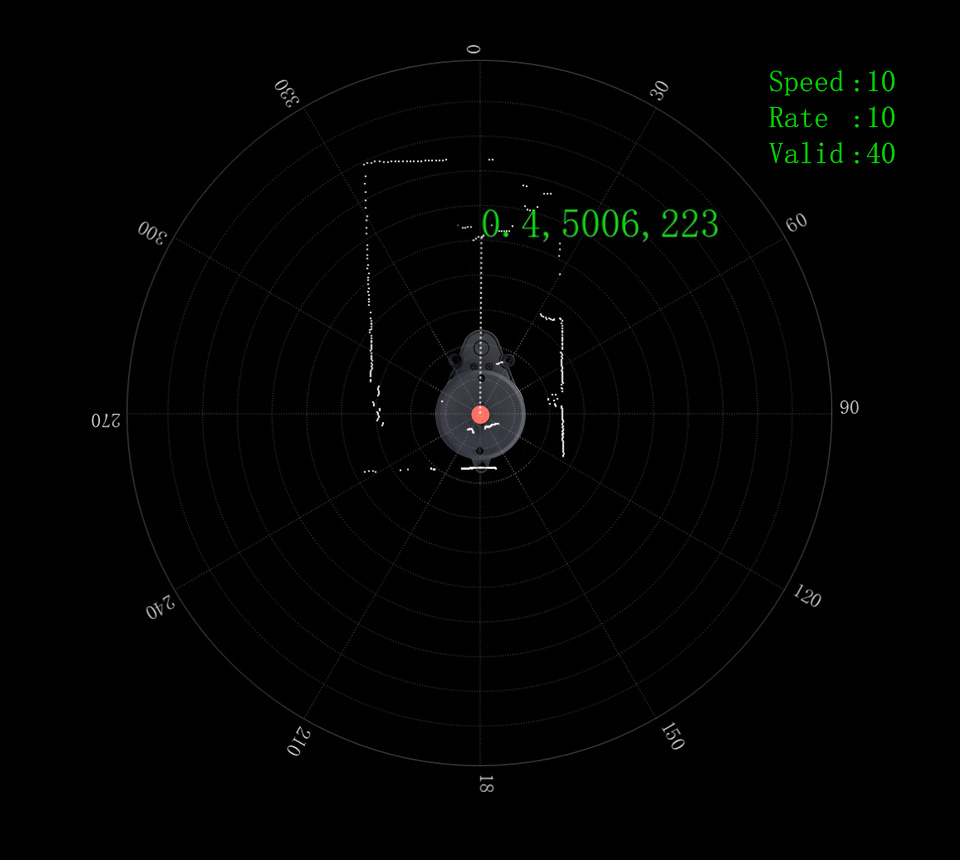
LD14 rotates clockwise in the ranging core to achieve 360° scanning of the surrounding environment, thus obtaining the information of the plane point cloud of the space where it is located.

2300Hz ranging frequency which can easily scan the outline of the scene within the ranging range and realize fast and accurate mapping
LD14 is based on triangulation radar technology to achieve independent mapping and obstacle detection for the robot

With a thin and light structure design, while ensuring performance, it features smaller size, lower power consumption, and easier installation, can be adapted to more robot types

To ensure the safety for humans and pets, a low power infrared laser emitter is used as the light source and is driven by modulated pulses, the laser completes the emitting action in a very short period of time, complying with the FDA Class 1 human eye safety rating

LD14 adopts high-performance light-sensitive CMOS, higher efficiency, more stable performance, more dense collecting points, and more accurate mapping




* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.
| Product | RPLIDAR A1 | DTOF LIDAR LD19 | D200 LiDAR Kit | DTOF LIDAR STL27L |
|---|---|---|---|---|
| RANGING DISTANCE | 0.15 ~ 12.00 m | 0.02 ~ 12.00 m | 0.15 ~ 8.00 m | 0.03~25.00 m |
| RANGING ACCURACY | 1% of actual distance (≤3 m) 2% of actual distance (3~5 m) 2.5% of actual distance (5~12 m) |
±45 mm (within 0.3 ~ 12.00m) | White target: ±5mm (0.1~0.5m) ±10mm (0.5~1m) ±1.0% of actual distance (1~6 m) ±1.5% of actual distance (6~8 m) |
±15mm (0.03~2m) ±20mm (2~8m) ±30mm (>8m) |
| Black target: ±7mm (0.1~0.5m) ±12mm (0.5~1m) ±1.2% of actual distance (1~4 m) ±1.5% of actual distance (4~6 m) NA (6~8m) |
||||
| SCANNING FREQUENCY | 5.5 Hz | 5 ~ 13 Hz (Typ 10) | 6Hz by default, 2 ~ 8 Hz externally controllable | 10 Hz |
| SCANNING ANGLE | 360° | 360° | 360° | 360° |
| RANGING FREQUENCY | 8000 Hz | 4500 Hz | 4000Hz | 21600Hz |
| RESOLUTION | ≤ 1% of actual distance (≤12 m) ≤ 2% of actual distance (within 12~16 m) |
15 mm | ≈ 17 mm | 15~30 mm |
| WAVELENGTH | 785 nm | 895 ~ 915 nm (Typ 905) | 775 ~ 800 nm (Typ 793) | 895 ~ 915 nm (Typ 905) |
| COMMUNICATION INTERFACE | UART | UART | UART | UART |
| POWER SUPPLY | 5 V | 5 V | DC 5V±10% | 4.5~5V |
| POWER CONSUMPTION | 0.5 W | ≈ 0.9 W | ≈ 1.5 W | 1.45W |
| OPERATING CURRENT | 100 mA | 180 mA | ≤300mA | 290mA |
| WEIGHT | 248 g | 47 g | 101g | 46.1g |
| OPERATING TEMPERATURE | 0°C ~ 40°C | -10°C ~ 40°C | -10°C ~ 50°C | -10°C ~ 50°C |
| DIMENSIONS(L × W × H) | 96.8 × 70.3 × 55.0mm | 54.00 × 46.29 × 34.80mm | 96.3 × 59.8 × 38.80mm | 54.00 × 46.29 × 34.80mm |
Weight: 0.143 kg
Quick Overview
- Triangulation LiDAR LD14 x1
- Adapter x1
- USB cable 50cm x1
- 4pin cable 9cm x1