Details
GNSS module based on MAX-M8Q for Raspberry Pi
accurate & fast positioning with minor drifting, low power consumption, outstanding ability for anti-spoofing & anti-jamming

This is a Raspberry Pi GNSS HAT based on MAX-M8Q with multi-constellation receiver support, which means up to 3 types of GNSS satellite systems can be used together, including GPS, Beidou, Galileo, and GLONASS. It also support augment systems like SBAS, QZSS, IMES, and D-GPS. It features accurate & fast positioning with minor drifting, low power consumption, outstanding ability for anti-spoofing & anti-jamming, and so on.
By simply attaching it onto the Pi, it is fairly easy to enable GNSS capability for your Raspberry Pi.
- Multi-constellation receiver support, concurrent reception of up to 3 types of GNSS satellite systems from GPS, Beidou, Galileo, and GLONASS, and still retains low power consumption
- Augment systems support, including SBAS, QZSS, IMES, D-GPS, improving the positioning performance of service location
- A-GNSS (Assisted GNSS) support, reducing the first positioning time when powered up, improving the acquisition sensitivity
- Features -167dBm navigating sensitivity and outstanding ability for anti-spoofing & anti-jamming, supports geo-fencing
- Supports U-Center, an easy way to config the module
- Standard Raspberry Pi 40PIN GPIO extension header, supports Raspberry Pi series boards, Jetson Nano
- Onboard USB TO UART converter CP2102 for serial debugging
- Breakouts the module's UART and I2C interface, for connecting with host boards like Arduino/STM32
- Baudrate range: 4800~921600bps (9600bps by default)
- Supports DDC (I2C compliant) interface: up to 400KHz (max)
- Onboard battery holder, supports ML1220 rechargeable cell, for preserving ephemeris information and hot starts
- 4x LEDs for indicating the module operating status
- Comes with development resources and manual (examples for Raspberry Pi/Jetson Nano/Arduino/STM32)
| GNSS Specifications | ||||||
|---|---|---|---|---|---|---|
| MAX-M8Q | GPS & GLONASS | GPS | GLONASS | BeiDou | Galileo | |
| Frequency band | 72x u-blox M8 engine channels GPS L1C/A, SBAS L1C/A, QZSS L1C/A, QZSS L1 SAIF, GLONASS L1OF, BeiDou B1I, Galileo E1B/C |
|||||
| Horizontal positioning accuracy | 2.5m CEP | 2.5m CEP | 4.0m CEP | 3.0m CEP | - | |
| Max navigation update rate | 10Hz | 18Hz | 18Hz | 18Hz | 18Hz | |
| Time-To-First-Fix | Cold starts | 26s | 29s | 30s | 34s | 45s |
| Hot starts | 1s | 1s | 1s | 1s | 1s | |
| Aided starts | 2s | 2s | 2s | 3s | 7s | |
| Sensitivity | Tracking and navigating | -167 dBm | -166 dBm | -166 dBm | -160 dBm | -159 dBm |
| Re-acquisition | -160 dBm | -160 dBm | -156 dBm | -157 dBm | -153 dBm | |
| Cold starts | -148 dBm | -148 dBm | -145 dBm | -143 dBm | -138 dBm | |
| Hot starts | -157 dBm | -157 dBm | -156 dBm | -155 dBm | -151 dBm | |
| PPS accuracy | RMS | 30ns | 30ns | 30ns | 30ns | 30ns |
| 99% | 60ns | 60ns | 60ns | 60ns | 60ns | |
| PPS frequency | 0.25Hz…10MHz (configurable) | |||||
| Velocity accuracy | 0.05m/s | |||||
| Heading accuracy | 0.3 degree | |||||
| Operational limits | Acceleration (max): 4g | |||||
| Altitude (max): 50000m | ||||||
| Velocity (max): 500m/s | ||||||
| other Specifications | ||||||
| Communication interface | UART (4800~921600bps, 9600bps by default), I2C (max 400KHz) | |||||
| Update rate | 1Hz (default), 18Hz (max) | |||||
| Protocol | NMEA 0183 Version 4.0 (V2.1, V2.3 or V4.1 selectable), UBX, RTCM 2.3 | |||||
| Power supply | 5V | |||||
| Overall current | <40mA@5V (Continue mode) | |||||
| Module current | 23mA@3V (Continue mode, tracking status) | |||||
| Operating temperature | -40℃ ~ 85℃ | |||||
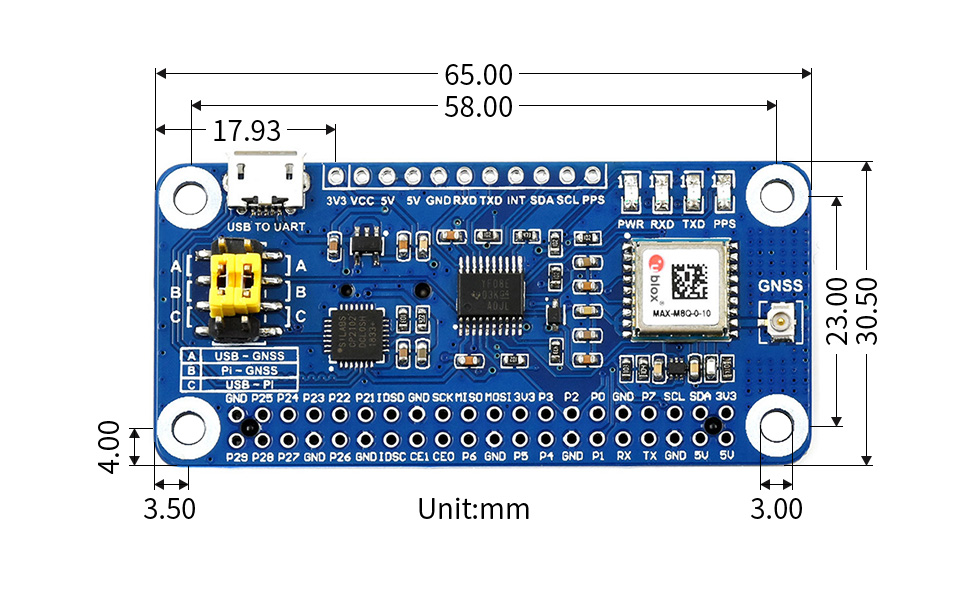
| Dimensions | 65mm × 30.5mm | |||||
Compatible with Raspberry Pi series boards, Jetson Nano

concurrent reception of up to 3 types of GNSS satellite systems, and still retains low power consumption
Supports GPS, Beidou, Galileo, and GLONASS

Augment system is aimed at improving the accuracy, completeness, reliability, and availability of positioning and navigation
Supports augment systems including SBAS, QZSS, IMES, D-GPS

Features -167dBm navigating sensitivity, outstanding ability for anti-spoofing & anti-jamming

an easy way to config the module

Ideal for fleet management, asset tracking, security systems, industrial PDA, GIS app, etc.

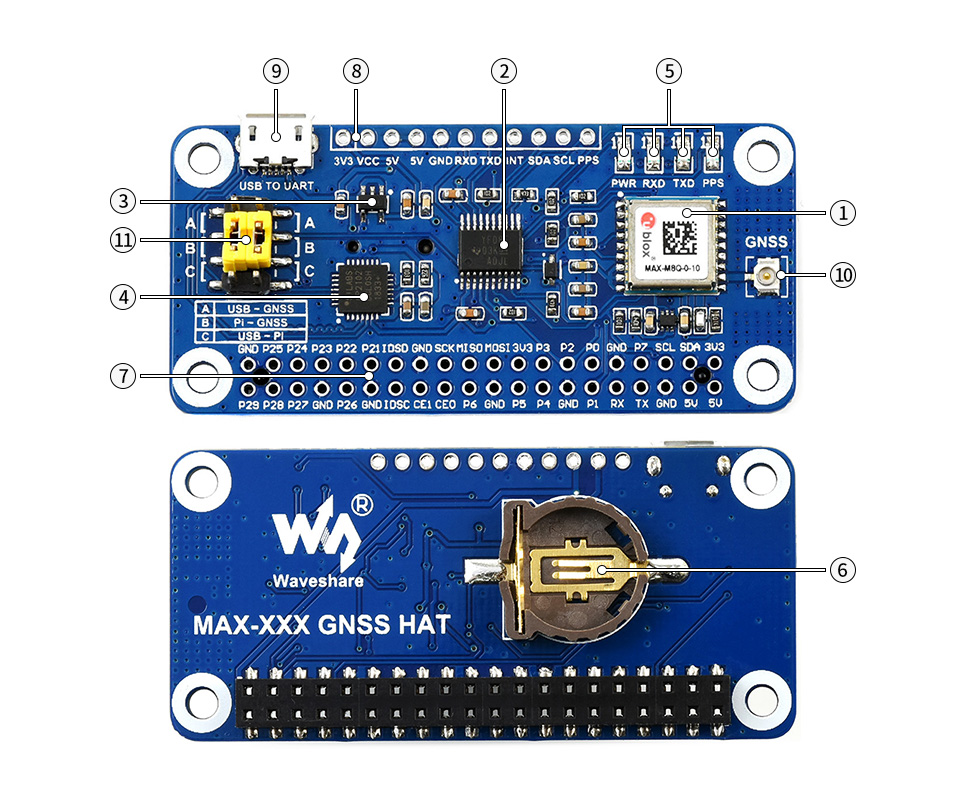
- MAX-M8Q module
- TXS0108EPWR voltage translator
- RT9193-33 power chip
- CP2102 USB TO UART converter
- Status indicators
RXD/TXD: UART TX/RX indicator
PPS: GPS status indicator
PWR: power indicator - Battery holder
supports ML1220 rechargeable cell, for preserving ephemeris information and hot starts
- Raspberry Pi GPIO header
for connecting with Raspberry Pi - UART, I2C interface
for connecting with other MCUs - USB TO UART port
- GNSS antenna connector
- UART selection jumper
A: control the MAX-M8Q through USB TO UART
B: control the MAX-M8Q through Raspberry Pi
C: access Raspberry Pi through USB TO UART



* Resources for different product may vary, please check the wiki page to confirm the actually provided resources.
Weight: 0.132 kg
Quick Overview
- MAX-M8Q GNSS HAT x1
- GPS External Antenna (B) x1
- USB-A to Micro-B cable x1
- RPi screws pack (2pcs) x1
- 2x20PIN female header x1





